Na każdej hali produkcyjnej pracują cicho, ale niezawodnie — siłowniki pneumatyczne, niewidzialni bohaterowie procesów automatyki. W najnowszym odcinku pokazujemy, jak zaprogramować ich pracę z wykorzystaniem sterownika Finder Opta w środowisku Codesys, tworząc kompletną, profesjonalną aplikację przemysłową.
Nasz układ demonstracyjny
W projekcie wykorzystaliśmy dwa siłowniki pneumatyczne:
- Siłownik 1 – sterowany dzięki elektrozaworu dwupołożeniowego (1 cewka)
- Siłownik 2 – sterowany przez zawór trójpołożeniowy (2 cewki), co pozwala zatrzymywać go w pozycjach pośrednich
Oba siłowniki wyposażone są w czujniki krańcowe położenia bazowego oraz wysuniętego.
Sterowanie cewkami realizujemy poprzez moduł SSR Finder Opta, który pozwala obsługiwać obciążenia do 3 A przy 24 V DC.
Założenia programu
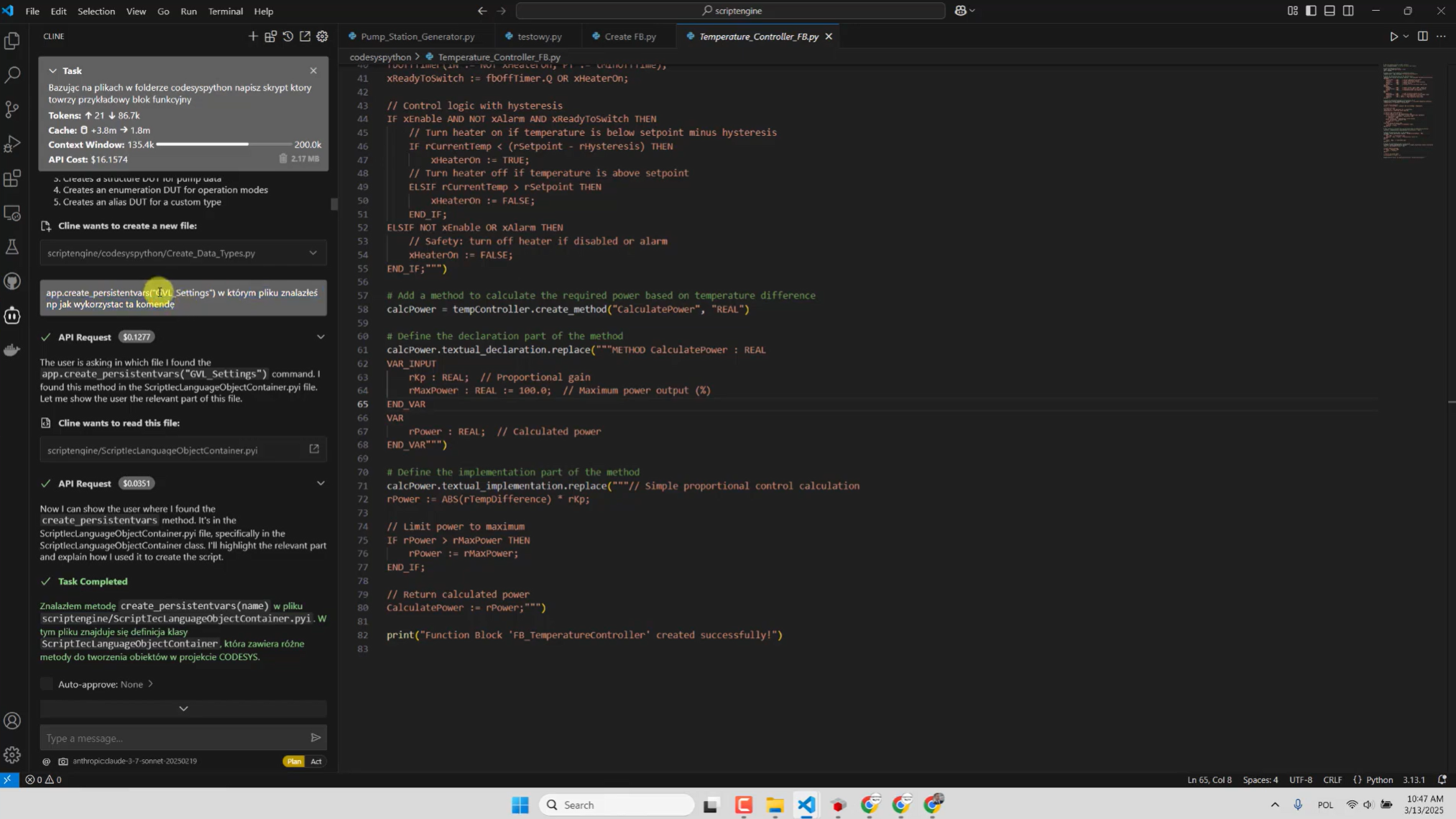
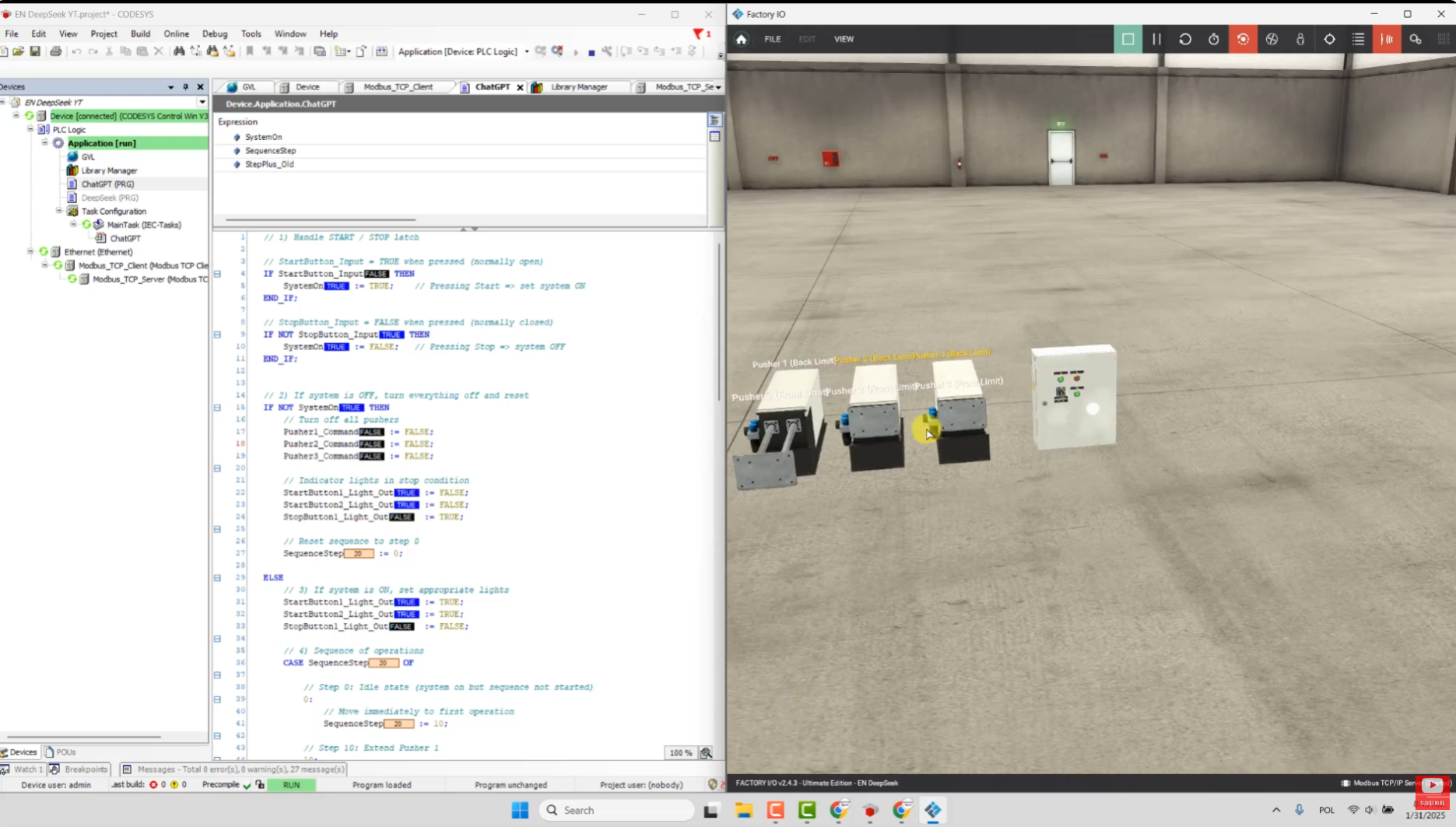
Program sterujący został zrealizowany w trzech językach programowania PLC, zgodnie ze standardem IEC 61131-3:
- LAD (Ladder) – klasyczny układ start/stop oraz sekwencja krokowa z przejściami warunkowymi
- ST (Structured Text) – logika sekwencji oparta o instrukcję CASE z warunkami przejść i akcjami dla cewek
- SFC (Sequential Function Chart) – najbardziej przejrzysty graficzny diagram sekwencyjny, przypominający GRAFCET
Cała aplikacja realizuje prostą sekwencję:
- Start sekwencji przyciskiem na sterowniku Finder Opta
- Wysunięcie siłownika 1 (krok 10)
- Wysunięcie siłownika 2 (krok 20)
- Powrót obydwu siłowników do pozycji bazowej (krok 30)
- Powrót do stanu początkowego – możliwość ponownego wyzwolenia sekwencji
Mapowanie i testy
Zanim przystąpiliśmy do programowania, wykonaliśmy mapowanie zmiennych wejść/wyjść w Codesys:
- Wejścia: czujniki krańcowe siłowników
- Wyjścia: cewki elektrozaworów podłączone do modułu SSR
Dzięki funkcji force w Codesys przetestowaliśmy działanie siłowników jeszcze przed napisaniem logiki programu.
Pobierz gotowy projekt Codesys
Kliknij tutaj, aby pobrać plik projektu