Wprowadzenie
W tym artykule przedstawię, w jaki sposób możemy łatwo skomunikować wieloosiowy falownik Inovance MD800 z oprogramowaniem InoProShop bazującym na Codesys dzięki protokołu komunikacyjnego EtherCAT. Do tego połączenia wykorzystam sterownik PLC również od Inovance, a będzie to model AM400 – sprawdź sterownik tutaj.
Podstawowe informacje o falowniku Inovance MD800
Falownik MD800 dokładnie przedstawiłem już w poprzednik artykule – Zaoszczędź 50% miejsca w szafie dzięki wieloosiowemu falownikowi Inovance MD800.

Przegląd technologii EtherCAT jako standardu komunikacyjnego
EtherCAT (Ethernet for Control Automation Technology) jest jednym z najnowocześniejszych standardów komunikacyjnych używanych w automatyce przemysłowej. Jego główną zaletą jest wyjątkowa szybkość i efektywność w transmisji danych, co pozwala na prawie natychmiastową wymianę informacji między komponentami systemu. Dzięki zastosowaniu technologii Ethernet, EtherCAT jest w stanie wykorzystać standardowe komponenty sieciowe, co obniża koszty implementacji i utrzymania systemów automatyki.

EtherCAT charakteryzuje się również bardzo niskimi opóźnieniami oraz wysoką precyzją synchronizacji, co jest najważniejsze w aplikacjach wymagających synchronizacji ruchu, jak np. w zaawansowanych liniach produkcyjnych czy robotyce. Sieć ta potrafi efektywnie obsłużyć setki urządzeń na jednej linii komunikacyjnej bez znaczącego wpływu na wydajność systemu, co czyni ją idealnym rozwiązaniem dla rozległych instalacji przemysłowych.
Ponadto, standard ten jest wspierany przez szeroką gamę producentów sprzętu i oprogramowania, co zapewnia dostępność komponentów i wsparcie techniczne na całym świecie.
Przygotowanie do konfiguracji
Wymagany sprzęt i oprogramowanie
Aby skomunikować ze sobą falownik, sterownik oraz oprogramowanie InoProShop, będę potrzebował:
Instalacja i konfiguracja środowiska InoProShop (Codesys)
Aby zainstalować oprogramowanie InoProShop
- Kliknij w ten link
- Wypakuj pobrane archiwum
- Otwórz plik InoProShop(V1.8.0.0).exe i przejdź przez proces instalacji.

Konfiguracja połączenia EtherCAT
Tworzenie projektu w InoProShop
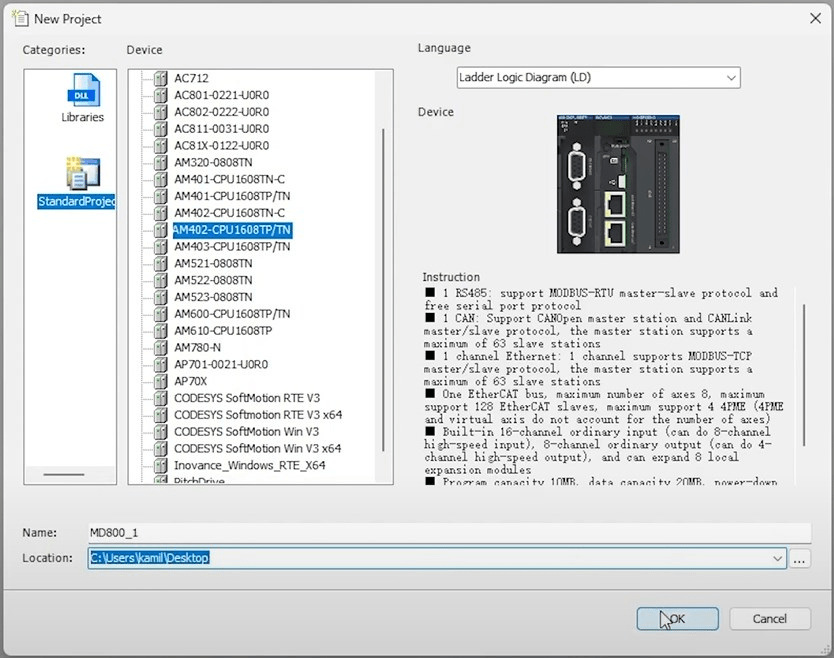
Gdy masz już zainstalowane potrzebne oprogramowanie, utworzymy pierwszy projekt.
- Kliknij File -> New project
- Wybierz z zakładki Standard project docelowy sterownik PLC
- Wybierz język, w którym chcesz programować
- Nadaj nazwę projektu
Konfiguracja sieci
Utworzyło się drzewo projektu przystosowane do wybranego sterownika. Teraz musisz skonfigurować obsługę protokołu EtherCAT dla tego sterownika.
- Kliknij na Network Configuration w drzewie projektu
- Następnie na ikonę sterownika
- Zaznacz opcję EtherCAT Master

Import konfiguracji falownika
Teraz musisz zaimportować plik konfiguracyjny dla falownika MD800
- Pobierz plik konfiguracyjny z tego linku
- Z menu nawigacyjnego wybierz Tools -> Device Repository
- Kliknij przycisk Install
- Wybierz pobrany plik
 Przed instalacją
Przed instalacją Po instalacji
Po instalacji- W drzewie projektu kliknij PPM na ETHERCAT (EtherCAT Master SoftMotion) i wybierz Add Device
- Wyszukaj MD800_ECAT_9Axis…., wybierz to urządzenie
- Kliknij Add Device

Programowanie i integracja
Przypisanie zmiennych
- W drzewie projektu klikamy LPM na nowo dodane urządzenie pod ETHERCAT
- W nowo otwartym oknie wybierz zakładkę Process DATA(PDO Setting)
- Zaznaczamy ile osi chcemy obsługiwać, w moim przypadku będą to 2 osie

Gdy aktywowaliśmy obsługę 2 osi, musisz teraz zdefiniować zmienne w programie dla PLC.
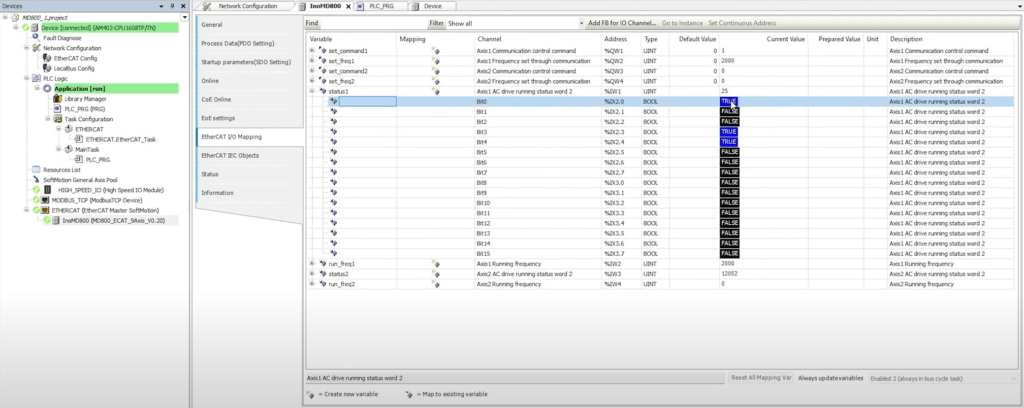
- Przejdź do zakładki EtherCAT I/O Mapping
- Pobierz instrukcję obsługi komunikacji – znajdziesz tam opisy wszystkich kanałów
- Nazwij i przypisz zmienne

Programowanie sekwencji falownika
Teraz przejdziemy do programowania sekwencji ruchu falownika.
- W drzewie projektu wybierz PLC_PRG
- Zaprogramuj ruch sterownika według własnego uznania wykorzystując blok funkcyjny MOVE do przenoszenia zadawanych wartości.

Przyszedł czas na wgranie programu do sterownika PLC, na początek połączę się ze sterownikiem PLC.
- W drzewie projektu wybierz zakładkę Device
- Kliknij Communication Setting -> Scan network
- PAMIĘTAJ! Podłącz sterownik do twojej sieci lub komputera dzięki kabla Ethernet. jeżeli to zrobiłeś to wybierz urządzenie, które zostało wykryte przez oprogramowanie. Dla PLC Inovance AM400 będzie to początek AM40…..
- Kliknij OK

Teraz zaloguje się do sterownika i gram napisany program.
- Kliknij Online -> Login
- Gdy program się załaduje, przestaw sterownik w tryb RUN klikając przycisk |>
 Ładowanie programu
Ładowanie programu Przechodzenie w tryb RUN
Przechodzenie w tryb RUNTestowanie programu
Zadawanie wartości
Program wgrany, sterownik uruchomiony, to przyszedł czas na…. zadanie prędkości do falownika!
- Ponownie przechodzimy do PLC_PRG
- W pierwszej zmiennej iFreqValue ustawiam wartość 1000 odpowiadającą 10Hz ze względu na zastosowany mnożnik w falowniku (np. 1000 = 10Hz; 2550 = 25,5Hz)
- W dla zmiennej komendy iCommandValue ustawiam wartość 1 (1 = jedź do przodu; 2 = jedź do tyłu)
- Ustaw bity xSetFrequency oraz xCommandExectute na wartość TRUE aby blok funkcyjny MOVE mógł przenieść zadane wartości do falownika.
- Kliknij CTRL+F7 aby nadpisać zmienne.
Tabelę wartości dla danych komend znajdziesz tutaj.

Po wykonaniu tych czynności twój silnik zacznie się kręcić!
A co jeżeli chcemy sprawdzić status danej osi?
Słowa statusowe
Do tego wykorzystamy słowa statusowe. W zakładce gdzie mapowaliśmy zmienne, możemy rozwinąć zmienną status1 i podejrzeć poszczególne bity statusowe (tabelę bit=status znajdziesz tutaj)
Podsumowanie
Udało nam się połączyć sterownik PLC Inovance AM400 z wieloosiowym falownikiem MD800 dzięki protokołu komunikacyjnego EtherCAT. Teraz wiesz jak możesz zadawać prędkość, komendy oraz odczytywać słowa statusowe z tego urządzenia. jeżeli masz jakieś pytania, napisz komentarz, a z pewnością odpiszemy!